Kona Europe’s Romain Barrez loves to get creative with his adventures and they usually involve his Sutra. Romain had the idea to take a dual sport outing to the next level and carry his pack raft aboard his bike for a multi-day bikepacking and packrafting expedition. From Nice, France, through Entrevaux, and up to Saint Julien du Verdon, Romain wound his way through medieval villages and gorgeous countryside, eventually finding himself paddling across The Verdon. This gorgeous film showcases the highlights of the route and features some of the most beautiful scenery we’ve ever seen.
On est un peu en manque de races depuis la saison dernière, et comme les occasions d’en voir ne vont pas se présenter d’ici quelques temps, autant forcer le destin. Big Bike vous propose donc 10 runs de pilotes français(es) qui ont marqué la coupe du monde de DH, un top 10 qui n’est pas un classement, mais plutôt une compilation des plus belles prestations des riders et rideuses hexagonaux qui ont marqué la DH. D’Anne Caro Chausson à Loris Vergier, en passant par Cédric Gracia et Myriam Nicole, voilà de quoi vous rincer les mirettes quelques minutes !
Rémi Thirion – Vallnord 2013
Depuis ses succès en Juniors, et notamment une troisième place aux mondiaux de Val di Sole, Rémi a du mal à confirmer en Elite. Et pourtant nul doute de ses qualités pures de pilotage. A Vallnord, sur une nouvelle piste tracée par Cédric Gracia, plus technique et plus raide, le Vosgien fait parler son sens de la trajectoire et sa grosse technique. Il remporte son première victoire en coupe du monde dans l’antre de Commençal, devant Gee Atherton, Sam Hill, Steve Smith et Troy Brosnan. Un des très grands moments des coupes du monde ayant eu lieu en Andorre.
Anne Caroline Chausson – Les Gets 1999 (passage à 6:00)
Anne Caro Chausson est encore jusqu’à aujourd’hui la pilote détenant le record de victoires en coupe du monde, devant Rachel Atherton. Parmi la multitude, nous avons choisi l’une de celles qui montrent le mieux la suprématie de la Française. Le dégoût et l’agacement qui se lisent dans les yeux de Missy Giove sont assez terribles, et ne manquent pas de nous rappeler Gee Atherton regardant descendre Steve Smith en finale de la coupe du monde de DH 2013, à Leogang.
Loïc Bruni – Cairns 2016
Cairns marque le déclic tant
attendu pour Loïc : le néo pilote Specialized a remporté le titre
mondial l’année précédente à Vallnord, mais il n’a pas encore gagné une
coupe du monde, laissant souvent la victoire s’échapper au dernier
moment, sur une erreur. A Cairns, il démontre deux qualités que l’on
connaît tous aujourd’hui : son physique et son mental à toute épreuve.
Conjuguées à son talent un guidon entre les mains, elles font de lui
l’un des meilleurs pilotes de l’histoire de la DH.
Cédric Vouilloz – Kaprun 1998 (passage à 1.03:10)
Parmi les nombreuses victoires de Nico Vouilloz, c’est celle-ci qui remporte la palme à nos yeux. Le Français y fait une démonstration et surtout cette vidéo est un beau rappel des pistes de l’époque, des riders aussi : Klausman, Gracia (en mode trottinette), Peat, Warner, Lopes… Un véritable étalage de talent sur un tracé qui demande un bike monté avec un plateau large comme une assiette de fruits de mer et des pilotes aux poumons de dauphin. Le tout avec une ablation de la rate de préférence.
Myriam Nicole – Val di Sole 2011
Sur la piste la plus difficile du circuit, en pédales plates et face à une sacré concurrence, Pompon s’arrache pour décrocher la victoire. C’est la première de sa carrière Elite mais aussi la première pour son team, qui ne vit pas ses meilleurs moments jusque là. D’un coup d’un seul, le « petit » team monté par Riding Addiction peut se targuer d’une victoire en coupe du monde. Et on sait maintenant le chemin qu’il a parcouru…
La coupe du monde aux Gets survient à un moment décisif de la saison. Loïc Bruni et Amaury Pierron se tirent la bourre comme jamais pour le titre, avec un léger avantage pour le pilote Specialized. Cette manche va changer la donne : devant un public survolté, venu en masse, Amaury sort ce que l’on peut aujourd’hui considérer comme le run le plus rapide et le plus engagé de la DH moderne. Une leçon de trajectoire et de prise de risque, qui se termine en apothéose.
Loris Vergier – Vallnord 2018
Pas facile pour Loris Vergier, qui est peut être le pilote le plus fin de tout le circuit de la coupe du monde, mais qui ne parvient pas à concrétiser aussi bien qu’Amaury ou Loïc. Et pourtant, il aurait pu monter sur la première marche du podium un bon nombre de fois. Comme Rémi Thirion, il débloque le compteur sur la piste ultra technique et poussiéreuse de Vallnord, dans un run au terme duquel il explose littéralement le chrono. Une victoire Ô combien méritée!
Marine Cabirou – Lousa 2 2020
Depuis longtemps pointée comme la relève de la DH, Marine Cabirou n’a pas fait mentir ses supporters. Arrivée chez Scott, elle remporte une première victoire à Val di Sole avec une avance insolente, puis confirme à Lenzerheide, une semaine plus tard. Un peu short pour ravir le général à Tracey Hannah, elle ne se dégonfle pas cette année et livre une grosse bagarre à Myriam Nicole pour aller chercher le titre lors de la finale de la coupe du monde à Lousa. La saison prochaine s’annonce bouillante !
Floriane Pugin – Leogang 2011 (passage à 14:21)
Partie un peu trop tôt à notre goût vers d’autres sports,
Floriane Pugin a longtemps été l’une des toutes meilleures françaises, à la lutte avec Rachel Atherton, Tracey Moseley, Emmeline Ragot, Sabrina Jonnier
… Elle remporte sa première et seule victoire en coupe du monde à Leogang, récompense de plusieurs saisons à truster les podiums.
Cédric Gracia – Leysin 2000 (passage à 7:00)
La qualité de la vidéo est affreuse, à l’inverse de la prestation de Cédric Gracia.
A Leysin, le Palois met tout le monde à l’heure dans des conditions dantesques
. Ni la technique de Mick Pascal ou le talent de Nico Vouilloz n’y peuvent rien.
Gracia pose 9 secondes à E.T et se met un overshoot qui vaut des points sur le dernier saut de la piste
… du pur CG!
from BigBike : Big Bike Magazine, l’actualité du VTT : Freeride … https://ift.tt/3arVIgp
Windsurfeur professionnel allemand, Nico Prien (présent sur le PWA World Tour) aime communiquer sa passion du windsurf à ses fans. Et quand il s’agit d’essayer pour la première fois d’anciens…
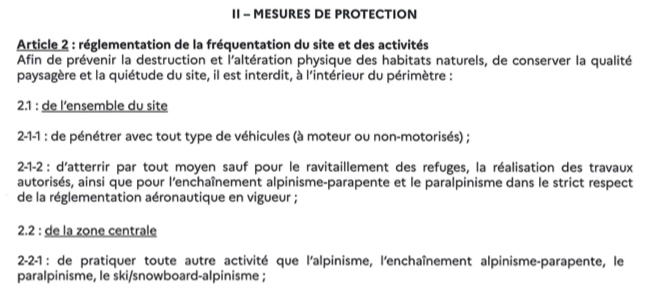
Le projet de création de la zone de protection d’habitats naturel du Mont-Blanc était depuis de nombreux mois en réflexion, puis en consultation publique. Un arrêté a finalement été publié par la préfecture de Haute-Savoie, signé en présence de Bérangère Abba, la secrétaire d’Etat auprès de la ministre de la Transition écologique, chargée de la biodiversité. Le but ? Pour faire simple, il est question de limiter les effets du tourisme de masse et leurs abus dans le massif.
Que dit le texte ?
Il interdit la pénétration avec tous types de véhicules, à moteur ou pas. Cette mesure ne concerne pas l’aérien, au grand dam de ceux pour qui les vols de tourisme au-dessus du massif du Mont-Blanc, avions et hélicoptères, constituent une nuisance majeure. Il interdit l’atterrissage sur l’ensemble du site « par tout moyen » (Article 2-1-2). Les drones, cette fois-ci, sont concernés. Par ailleurs, il interdit de pratiquer dans la zone centrale « toute autre activité que l’alpinisme, l’enchaînement alpinisme-parapente, le paralpinisme, le ski/snowboard-alpinisme » (Article 2-2-1) – c’est le cas de l’aéromodélisme. L’arrêté décrit l’emprise des zones avec une liste des parcelles cadastrales concernées. Il matérialise cette emprise avec plusieurs cartes.
Traduction ?
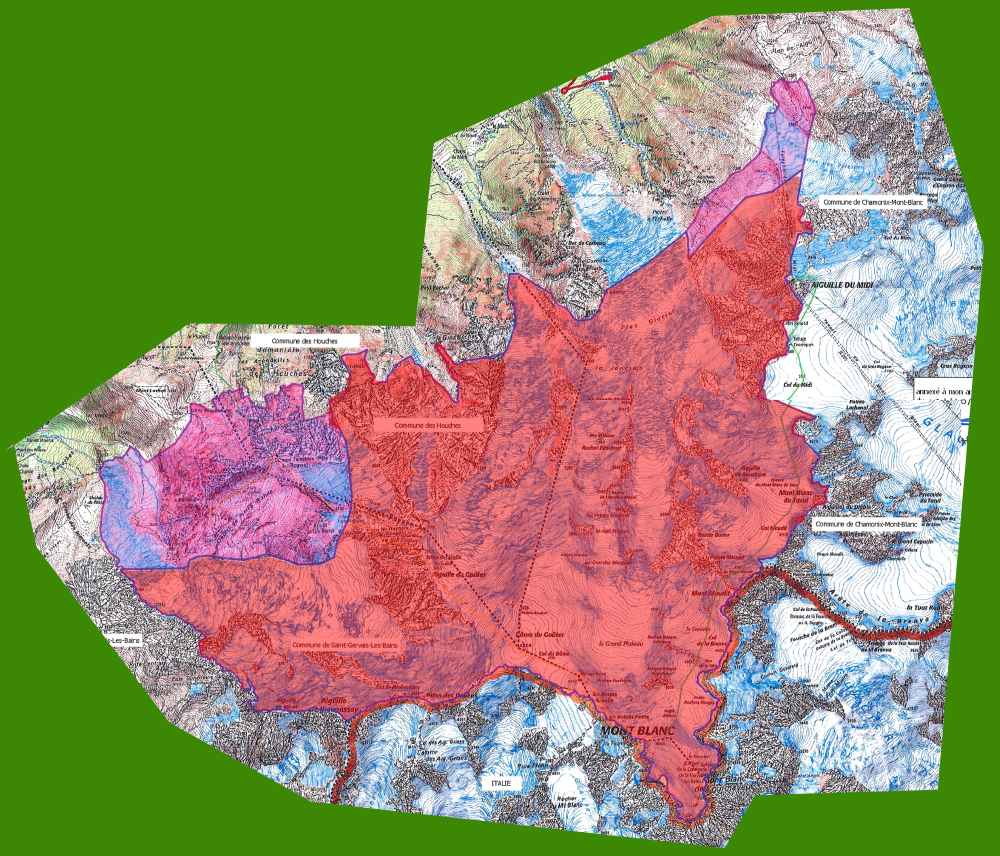
Cartes assemblées à partir de celles accompagnant l’arrêté.
Le survol de la zone centrale est interdit en drone de loisir. Le survol des zones de transition n’est pas interdit, mais il faut atterrir à l’extérieur de ces zones. Mais étant donné que le vol de loisir impose de piloter en vue directe (et à moins de 200 mètres de distance pour le FPV), on peut considérer les zones de transition sont également interdites de vol. L’emprise des différentes zones est matérialisée par des cartes jointes à l’arrêté. Je vous propose un assemblage de ces cartes pour un résultat en haute définition (à télécharger ici) : le marquage rouge indique la zone centrale, interdite de vol, les marquages mauves indiquent les zones de transition, interdites d’atterrissage mais que l’on peut aussi considérer comme aussi interdites de vol. Donc sur cette carte, toutes les zones en couleur sont interdites de vol en drone.
Que dit Geoportail drones de loisir ?
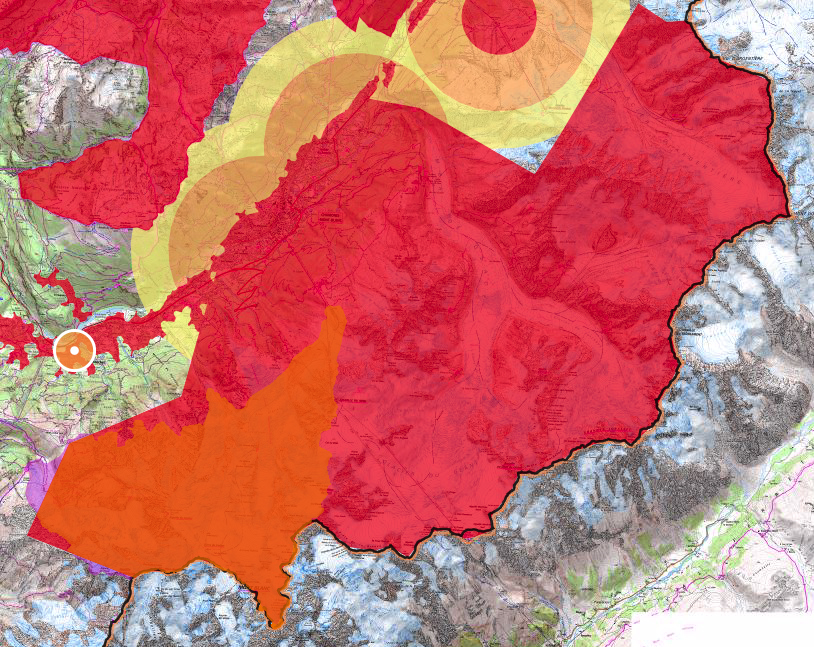
Geoportail : rouge, orange et emprises heliports. Cartes de l’arrêté : mauve et orange.
Le portail de l’IGN indique l’intégralité de la zone du Mont-Blanc en rouge, interdite de vol. Est-ce la matérialisation de l’arrêté de création de la zone de protection du Mont-Blanc ? Non ! Il indique l’immense zone R 30 B qui protège tout le massif, plus la petite R 30 A. Si Geoportail drone de loisir indique l’intégralité de cette zone comme interdite de vol, c’est par excès de simplication. En effet, l’immense R 30 B n’est active que du 1er juillet au 31 août. Attention, la petite R 30 A est active toute l’année, elle. Donc Geoportail ne montre pas la matérialisation de l’arrêté de création de la zone de protection du Mont-Blanc, laquelle est beaucoup plus petite et quasiment englobée dans la R 30 B… mais dépasse un peu à l’ouest du massif. Pour mieux comprendre, vous pouvez consulter la carte ci-contre. Les zones mauve et orange sont interdites de survol, elles correspondent à la zone de protection du Mont-Blanc. La grande zone rouge est interdite de vol en été, autorisée en hiver. Mais Geoportail la laisse en rouge toute l’année, qu’elle soit active ou pas. Attention, lorsque la zone rouge est inactive, les emprises d’hélistations et d’altiports restent actives, elles. Or sur Geoportail, à cause du rouge qui cache tous les détails, on ne voit pas les altiports, et on ne voit que partiellement les hélistations (les ronds qui indiquent les hauteur de vol possibles). Il faut d’autres outils (voir le paragraphe suivant) pour les connaitre. Si vous n’avez pas envie de vous plonger dans des cartes complexes en tenant compte des dates, référez-vous à Geoportail. Même s’il n’est pas exact par excès de simplification, il vous empêchera probablement de décoller d’un endroit interdit.
Pour plus de précision ?
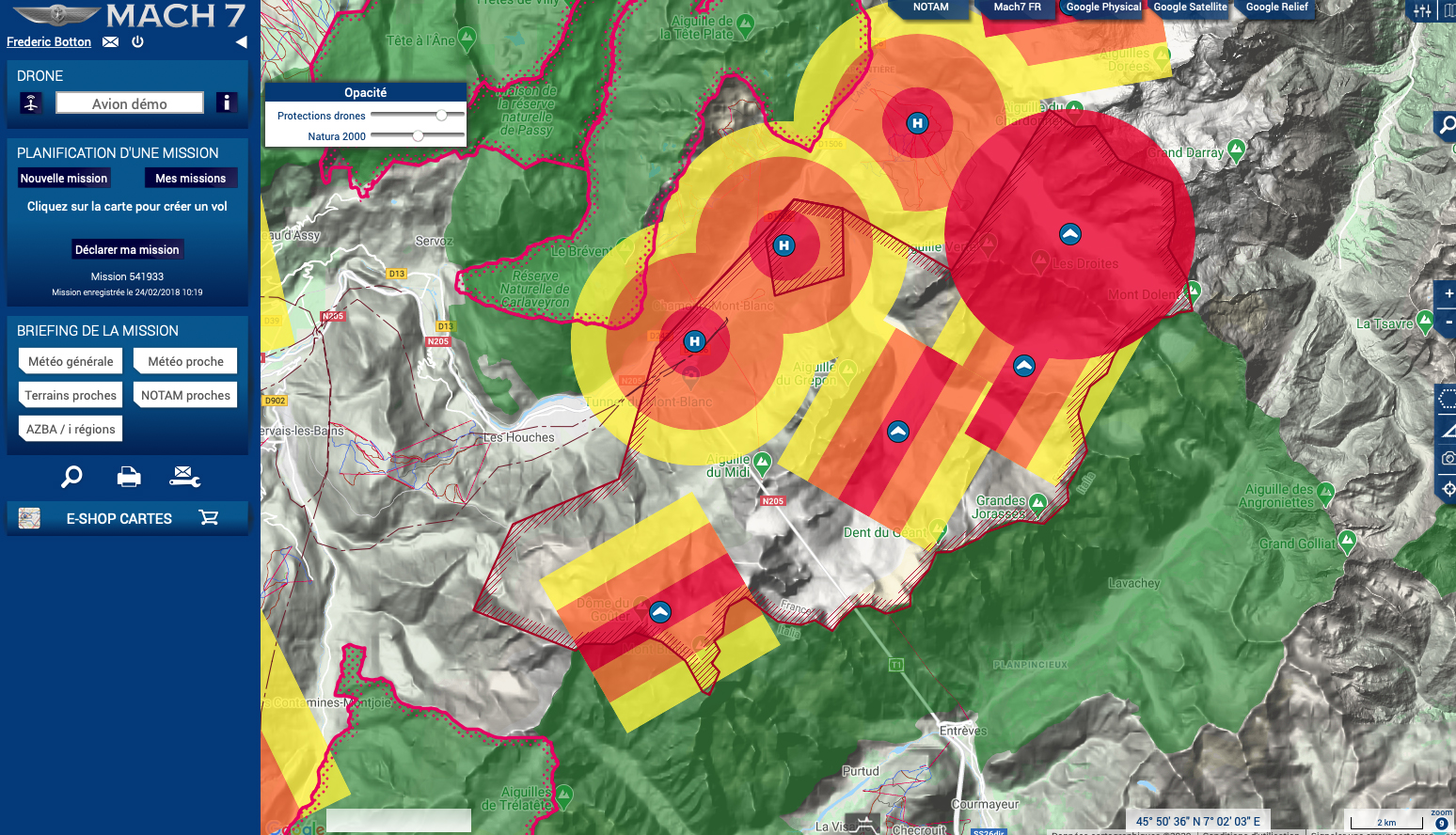
Les emprises aéronautiques liées aux drones avec Mach 7 Drone.
Vous aimez comprendre les restrictions que l’on vous impose, et surtout savoir exactement où voler et où s’abstenir ? Dans ce cas, il faut consulter les cartes jointes à l’arrêté de création de la zone de protection du Mont-Blanc (voir le paragraphe Traduction ?), puis vous tourner vers Mach 7 Drone pour obtenir les limites de la petite zone R 30 A (toute l’année), de la grande zone R 30 B (tout l’été), ainsi que des différentes emprises d’hélistations et d’altisurfaces qui se trouvent dans le massif. Ce n’est pas facile ? Non, clairement pas.
Le bon sens !
Quel que soit l’endroit où vous volez en montagne, soyez toujours très attentif à l’environnement. Car même là où vous avez le droit de voler, vous pouvez rencontrer un appareil habité : secours, entrainement, ravitaillement, livraison, travaux, etc. Rappelez-vous de cette vidéo, publiée par la Société de Prévention et de Secours en Montagne, dont le message a le mérite d’être parfaitement clair.
Top départ de la Coupe de France de Vitesse 2020, organisée par l’équipe du Prince of Speed ! Parmi les concurrents en lice, on retrouve Antoine Albeau, actuel détenteur du record du monde de…

 Windsurfeur professionnel allemand, Nico Prien (présent sur le PWA World Tour) aime communiquer sa passion du windsurf à ses fans. Et quand il s’agit d’essayer pour la première fois d’anciens…
Windsurfeur professionnel allemand, Nico Prien (présent sur le PWA World Tour) aime communiquer sa passion du windsurf à ses fans. Et quand il s’agit d’essayer pour la première fois d’anciens…

 Top départ de la Coupe de France de Vitesse 2020, organisée par l’équipe du Prince of Speed ! Parmi les concurrents en lice, on retrouve Antoine Albeau, actuel détenteur du record du monde de…
Top départ de la Coupe de France de Vitesse 2020, organisée par l’équipe du Prince of Speed ! Parmi les concurrents en lice, on retrouve Antoine Albeau, actuel détenteur du record du monde de…





